
TOWARDS ARTIFICIAL DNA MOLECULAR MOTORS THAT CAN WALK OVER MICROMETERS
2Ilse Katz Institute for Nanoscale Science and Technology, Ben-Gurion University of the Negev
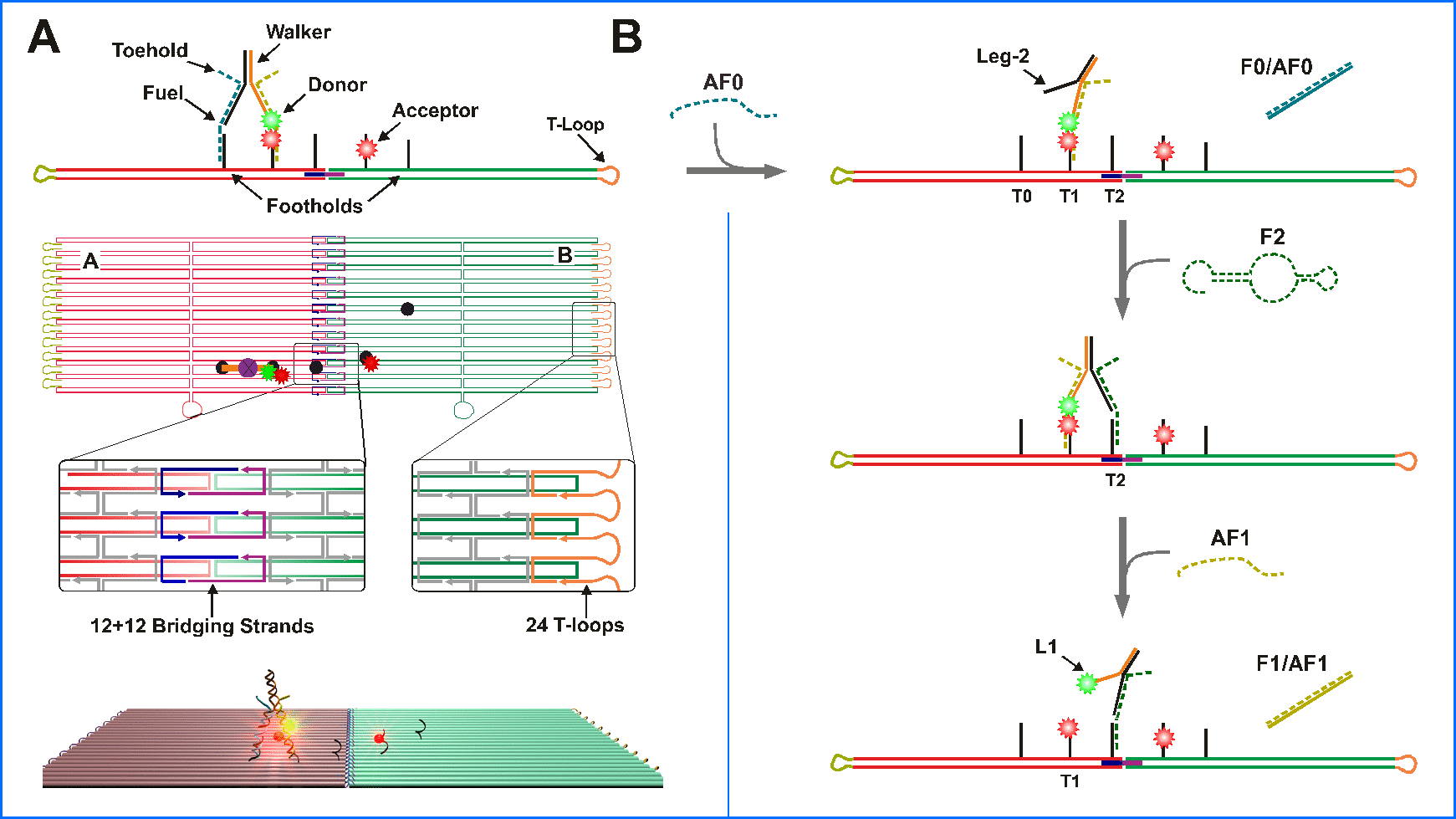
Inspired by biological molecular motors such as Kinesin, which walk on microtubules over distance of several micrometers, our group develops artificial molecular motors made of DNA. We demonstrate striding of a bipedal walker over a distance of ~ 400 nm, in a back and forth fashion, on a 90 nm long track embedded into a DNA origami. However, to enable a unidirectional walking over long distances, it is necessary to attach several origami units in a control manner and with high yield and stability.
For that purpose we study different methods for connecting DNA origami tiles to create long tracks. The binding and unbinding reactions, yields and kinetics, were measured using single-molecule fluorescence spectroscopy, and binding methods and conditions were optimized to achieve best yield and stability.
Furthermore, by comparing the processivity of a motor striding on a single origami tile to that of an identical motor striding across the gap between two attached origami tiles we demonstrate that the walker does not dissociate when crossing between the origami[1]. Moreover, we demonstrate that dozens of origami tiles can be connected to form a stable micrometer-long track. By these means we successfully demonstrate the necessary steps towards long range, robust and reliable artificial molecular motors and machines.
[1] Liber, et al. A Bipedal DNA Motor that Travels Back and Forth between Two DNA Origami Tiles Small 11 (2015): 568-575.
Powered by Eventact EMS