ביצועים של רוב מכשירים אופטיים מושפעים משינויי טמפרטורת סביבה. מנגנונים לפיצוי תרמי מיועדים לניטרול של התופעה. ישנן שיטות של פיצוי תרמי שונות ומגוונות. אחת מהשיטות מבוססת על שרשראות קינמטיות עם אפס דרגות תנועתיות. לשיטה הזאת פונים כאשר יש צורך בפיצוי תרמי בגופים יחסית גדולים, שעובדים בשינויי טמפרטורה קיצוניים. לדוגמה, מכשירים מוטסים, שעוברים שינויי טמפרטורה של עשרות מעלות בין תנאי קרקע לבין תנאי הטיסה או טלסקופים חלליים, שבמחזוריות נכנסים לצל או נחשפים לשמש. לשרשראות קינמטיות שיכולות לתפקד כמפצה של התפשטות (התכווצות) תרמית יש מאפיינים משותפים: 1. בכל רגע נתון הן מהוות מסבך; 2. בשינוי טמפרטורה מתרחשת תנועה יחסית של חוליותיהן ללא הפעלה מכנית חיצונית כלשהי. שרשראות עם אפס דרגות תנועתיות מטבעם מהוות מסבך. אבל, אם אחת או כמה חוליות של השרשרת עשויות מחומר עם מקדם התפשטות שונה מזה של שאר החוליות מתרחשת תנועה יחסית של החוליות. כינוי "מנגנון עם אפס דרגות תנועתיות" נובע מאיחוד תכונות ניגודיות במנגנון אחד. בדרך כלל בחירת סכמה של מנגנון פיצוי מסוג זה - אינטואיטיבית. לכן תמיד יש חשש לפספס סכמה אופטימלית. בעבודה הנוכחית נעשה ניסיון לתת בסיס תיאורטי לאיתור סכמות קינמטיות עם תנועתיות אפס אשר מתאימות לשימוש כמנגנונים לפיצוי תרמי. במקרה הכי פשוט, במנגנונים פלנריים עם אפס דרגות תנועתיות, מספר חוליות ומספר חיבורים קינמטיים עם דרגת חופש אחת, מוגדרים בנוסחת Grubler:
n – מספר חוליות נעות; - מספר חיבורים קינמטיים.
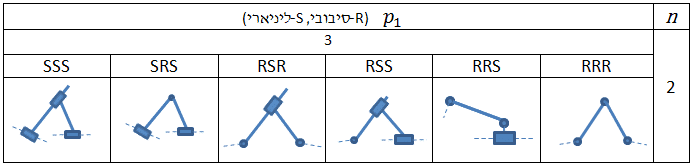
בטבלה 1 מופיע חלק של סכמות, שמהוות בסיס למנגנונים לפיצוי תרמי. בהרצאה יוצגו דוגמאות של יישומים קיימים ויישומים פוטנציאליים.