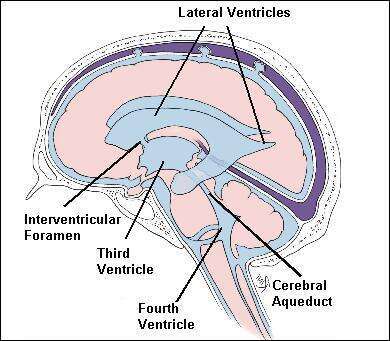
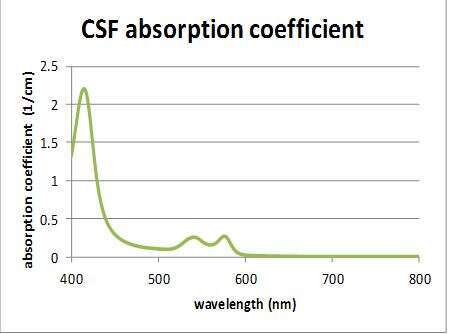
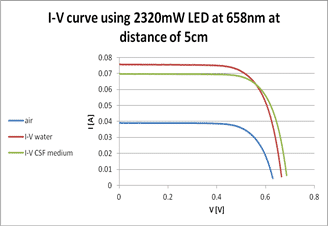
One of the major difficulties in minimizing the size of a wireless micro robot is finding a suitable power source. In this project our goal is to investigate the transfer of power from an external light source to a photovoltaic receiver in order to drive a swimming micro robot for neurosurgery. A major advantage of such a power source is that it downscales by the surface area of the robot and not by its volume. Another large advantage is the ability to operate the robot for a long time without the need to charge the battery. Related work has been done in this field, by Ishihara and Fukuda [1], but it was based on using pyroelectric and optical piezoelectric elements. The robot will be swimming in the Ventricular system of the human brain (figure 1, 2). The ventricular system of the brain is filled with CSF - Cerebrospinal fluid. The optical properties of the CSF were measured by Kronholm and Lintru [3], showing that near infrared wavelength passes very well through the CSF. Our measurements of CSF properties show a lower absorption in the deep-red/infra-red zone (figure 3). In order for the robot to operate, it needs approximately 10mW. The area of the robot that faces the light is of area of 25mm. For a 20% efficiency solar cell this means that we need a light flux of 2mW/mm^2 on the solar cells. In one of our experiments we show that the light transfer through CSF is slightly less than the transfer in water. We get an amount of 36mW of electricity on a 20X6 solar cell, which equals a light flux of 1.5mW/mm^2.